
最新の音響装置とロボットを用いた宮城県東部 (気仙沼湾)の瓦礫調査
熊本大学沿岸域環境科学教育研究センター 秋元和實
平成25年10月30日(水)
はじめに
なぜ連続観測が必要か?
現在の海洋環境学では,水質や底質の調査に代表されるように,定点において環境情報を収集している.この点で収集された情報は正確である (ただし設定した地点が対象とする海域全体の環境を代表しているかは別である)としても,2点間の変化は自然の状態を正確に反映しているだろうか?この変化は数値の違いから推定しているにすぎず,真の姿との間には,常に「曖昧さ」が存在する.
この曖昧さが許容できないのが,災害地調査である.平成23年3月11日に発生した巨大津波で被災した福島第一原子力発電所から流出した放射性物質の分布を定点で採水と採泥して分析して濃度を測定し,分布を推定していた.しかし,底生生物での濃度が低下しない原因がわからなかった.そこで,放射線測定器を海底に降ろして,曳航することによって,直径数100m程度の高濃度の場所 (ホットスポット)が明らかにされ,農集の実態に迫ることができるようになってきた.このように,現在の調査は,点から線で,線から面で,情報を収集する傾向にある.そこで,今回の講演では,平成23年3月11日に発生した巨大津波の被災地における調査を事例とした.
音響機器とロボットを使用する理由
巨大な津波は,地域経済に甚大な被害をもたらした.地域経済の基盤である漁業の再建には,水中のインフラ(港湾や養殖施設など)や漁場の被災状況の情報が希求される.気仙沼湾西湾域では,早期の漁場回復,漁業産業再生,さらに雇用創成のために,流失した石油タンクから漏出した油による2次被害を防ぎつつ,瓦礫を撤去して,養殖(ワカメ,牡蛎,ホヤ,アワビなど)事業などの再建を目指している.このために,海中に残る瓦礫の量,種類,位置を正確に把握し,その分布特性を解析して,効率の良い撤去が希求されていた.さらに,地形変化は湾内の海流などに,底質変化は養殖施設の土台の敷設に影響を与える.とくに,油汚染堆積物は,津波,台風,養殖施設工事等によって拡散する可能性があり,継続した観測と浄化が望まれていた.
復興対策には,必要な基礎情報(地形,底質,瓦礫の位置,種類,規模の正確な情報)を,広域で,短時間に,高精度で,かつ連続して収集することが必要である.しかも,従来の知見は,被災時の異常な条件で形成された環境には適用できない.また,ダイバーによる潜水調査は,危対を伴う上に,沖合を含めた広域の調査には対応できない.
そこで,定点観測で欠落していた連続性を有する面的調査が必要となる.一方,海水は,電磁波や音波を吸収するため,エネルギーの減衰の軽減と分解能の確保を目的に合わせて選択することが求められる.このため,広域観測と局所観測とを組み合わせた情報収集が行われる.図1に地形,底質の把握 (低周波 (250kHz,400kHz) を使用),瓦礫の特定 (高周波 (700kHz)および自律型ロボットを使用),油汚堆積物の移動(遠隔操作無人ロボットを使用)までの調査の概略を示した.
気仙沼湾の調査でなにがわかったか
これまで,気仙沼港北部(魚市場前―蜂ケ崎)と大島瀬戸西部(松明鼻沖)において海底の大規模な洗掘(最大9m),気仙沼港中部(蜂ケ崎―二ノ浜)と気仙沼湾西湾南東部(―)にメガデューンの分布が認められた.この地形変化は,水産庁の津波シミュレーションの流速1m以上の範囲と一致した.さらに,復興再生・日本再生事業 (国立大学協会選定事業)によって収集してきた地形情報を,宮城県知事から谷口学長への要請に基づいて,無償で提供した.このことは,本事業が国民から国立大学に寄せられている社会的要求にも充分に応えている内容ことを示している.
過去2年間に宮城県に報告した大型瓦礫(船,石油タンク,浮き桟橋など)に加えて,新たにパイプの集合体.クレーン,複数のコンテナなどを発見した.大型の瓦礫は,気仙沼港中部のメガデューン分布域には皆無である.その分布は,気仙沼港の北部と南部の大島瀬戸西端までに限られる.
流出した重油と津波で撹拌された堆積物は短期間で混合して堆積したため,油の含有量は㎞の単位で変化すると考えられていた(宮城県の調査も気仙沼湾全域で22地点である).一方,含有量が気仙沼港で減少し,大島瀬戸東部で増加していることが報告されている.我々が2年間の間で複数の地形調査を行い,その経年変化から気仙沼港と大川河口で削剥し,大島瀬戸で堆積していることが明らかになった.この傾向は,油の含有量の変化と潮汐の下げ潮の方位と一致していることが認められ,地形の経年変化から重油汚染堆積物の拡散予測につながることを導いた.そこで,油の除去技術の確立を目指して,東北マリンサイエンス事業(文部科学省)の1課題として,「漁場再生ニーズに応える汚染海底浄化システムの構築」(熊本大学・東京海洋大学共催:2012年8月16日採択)として取り組んでいる.
さらに,油汚染堆積物の除去事業予定地(気仙沼港北部)で,南北100m,東西で100mの範囲で,音響測位装置を搭載した遠隔操作ロボットで海底を観察しながら,6地点から試料を採集した.それらの試料の油の含有量は大きく異なり,局所的に濃集しているホットスポットの存在を示した.従来の定点で試料採集して油を含む有機物を測定する方法では,残存量を正確に見積もることが難しいことも明らかになった.
今後のシステムの改善
ホットスポットの問題を解決するためには,放射能と同様に連続して測定できる技術を確立しなくてはならない.そこで,東北マリンサイエンス拠点形成事業で構築した地形詳細把握システムで使用している遠隔操作ロボットに,レーザーを用いた堆積物に含まれる油の測定センサーを搭載することを模索している.この測定方法は,基本的に油汚染に限らず,赤潮の原因となるシストなどの広範の有機物に応用できる.ROVの測位装置により,広範の有機物の空間的広がりを短時間で精密に図化できるようになると考えている.
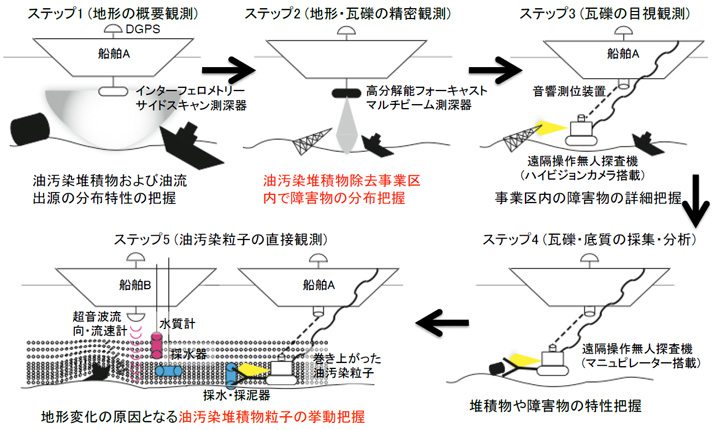
図1 地形詳細把握システムの運用.全容観察(音響機器),詳細観察(光学機器)および詳細把握
(ロボットおよび採泥・採水器による粒子物性解析,超音波流向・流速計および水質計による粒子密度測定)の順に詳細に観察することになる